S.CRAP
Design, Manufacturing, and Path Planning of a Collaborative SCARA
About The Project
We aim to design, manufacture, and perform a comprehensive path planning analysis of a 4 DoF (Degree of Freedom) Collaborative SCARA (Selectively Compliant Articulated Robotic Arm). The versatile nature of the robotic arm, with its interchangeable end-effector, enables it to perform a wide range of tasks. Our main aim is medical lab automation, with further small-scale industrial applications like palletizing, drilling, and soldering aimed as future work. This project embodies the integration of various engineering disciplines to create a programmable robotic arm that can operate alongside humans, facilitating increased productivity and safety in diverse working environments and furthermore, embarks the prototyping phase of this endeavour of providing affordable automation in Pakistan.
Wireframes
")
")
")
")


")


")
")

")

")



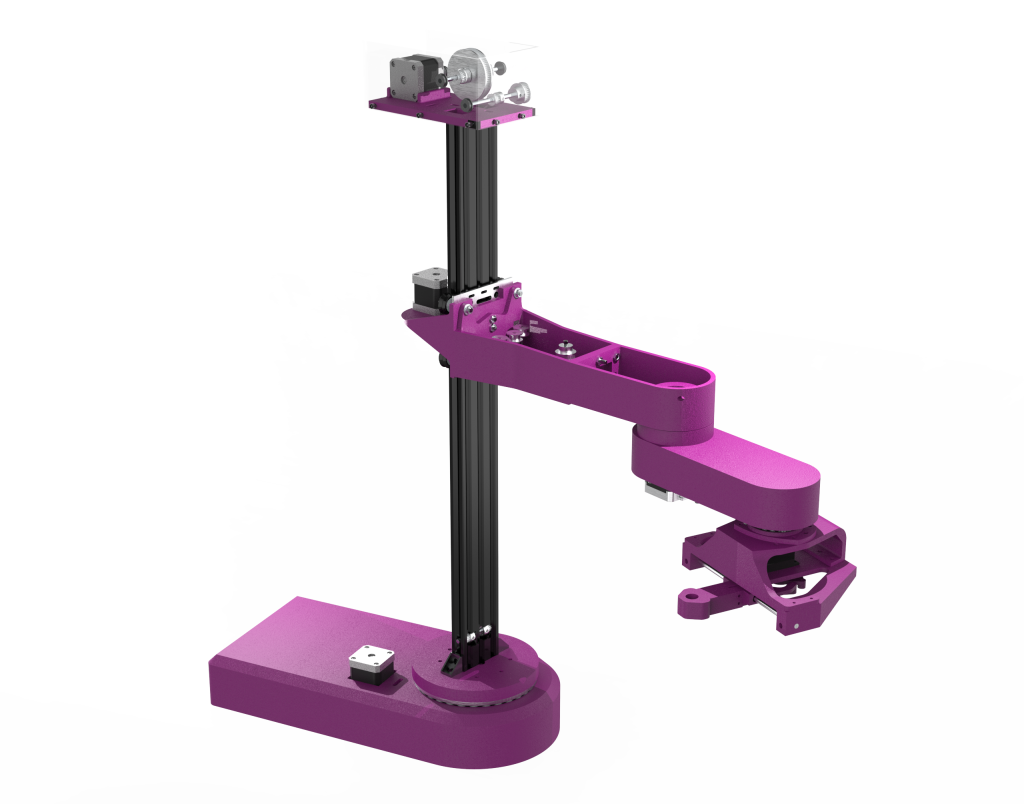
Renders
Electronics